Low-Cost Quadruped Robot
Overview
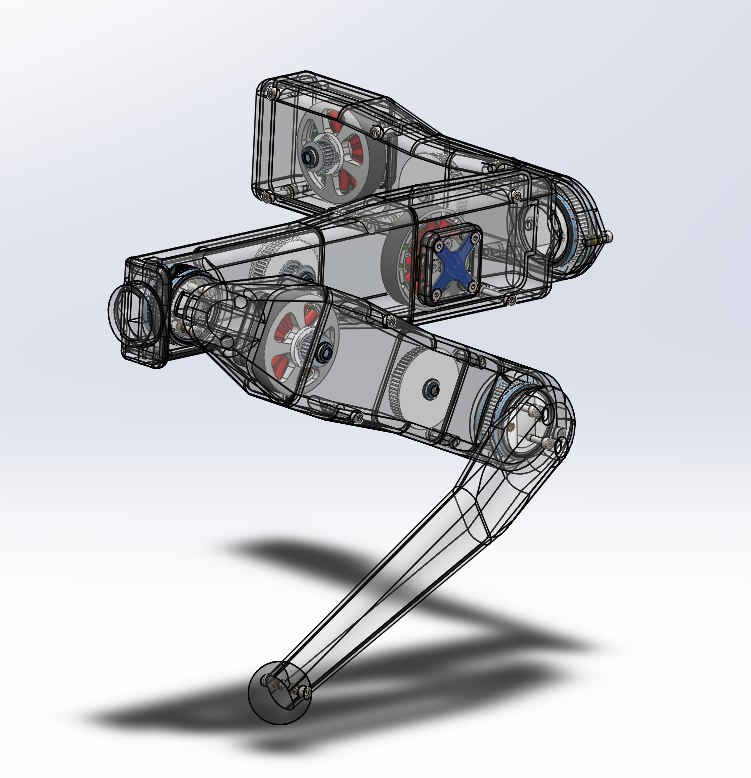
A quadruped robot project focused on using affordable components. The robot uses brushless motors with ODrive motor controllers and implements a pulley belt mechanism for leg actuation. The project aims to create a low-cost platform for legged robotics research and development.
System Architecture
- Actuation: Brushless motors with pulley belt mechanism
- Motor Control: ODrive controllers for motor control
- Structure: Custom frame design with 3D printed parts
Main Components
- Brushless Motors
- ODrive Motor Controllers
- Pulley Belt System
- 3D Printed Frame Parts
- Control Electronics
Motor Testing
Initial testing was conducted to assess motor controllability and define performance specifications, as the supplier didn't provide detailed specifications. The test setup allowed for measuring motor response and control characteristics under various loads.
Setup and Usage
-
Mechanical Assembly
- Assemble the frame and mount brushless motors
- Install pulley belt system for each joint
- Configure mechanical tensioners for belts
-
Electronics Setup
- Configure ODrive controllers for each motor pair
- Set up Raspberry Pi with ROS environment
- Install and calibrate IMU sensor
-
Operation
- Run motor calibration sequence
- Start ROS control system
- Execute walking gaits through command interface
Future Objectives
While the current implementation focuses on basic walking gaits, future development will include:
- Advanced dynamic walking algorithms
- Terrain adaptation capabilities
- Computer vision for navigation
- Force sensing for improved ground contact
- Energy optimization for longer operation